Research
青色レーザーによるFMCW LiDARの開発
研究の背景
近年、海洋資源探査や海中インフラ監視、無人潜水機(AUV)による計測などを背景に、水中で高精度に距離計測が可能なLiDAR技術への期待が高まっています。水中では光の吸収が波長に強く依存するため、450–550 nmの青緑色領域(ブルーグリーンウィンドウ)が有利とされています。
従来主流であったパルス型(ToF)LiDARに対し、FMCW LiDARは
高い距離分解能
高感度
距離と速度の同時計測
といった利点を持ちますが、広帯域かつ線形な周波数掃引(チャープ)が可能な可視レーザ光源が大きな技術課題でした。
本研究の新規性とアプローチ
本研究では、466 nm帯のGaN系分布帰還型レーザーダイオード(DFB-LD)に着目しました。
DFB-LDは
単一周波数発振
小型・低消費電力(SWaP特性)
電流直接変調による高速チャープが可能
といった利点を持ち、水中LiDAR用光源として有望です。
本研究では、
遅延自己ヘテロダイン干渉計(DSHI)を用いた周波数雑音評価
チャープ幅・非線形性の定量測定
可視DFB-LD単体によるFMCW LiDAR動作実証
を系統的に行いました。
主な研究成果
① 広帯域チャープの実証
三角波電流変調(1 kHz)により
最大 12.2 GHz のモードホップフリー周波数掃引を達成水中換算での理論距離分解能は 約0.9 cm
② 周波数雑音とコヒーレンス評価
周波数雑音スペクトルを 1 Hz〜10 MHz の広帯域で測定
有効コヒーレンス長は 約14 m
FMCW LiDARにおける測距可能距離の指標を明確化
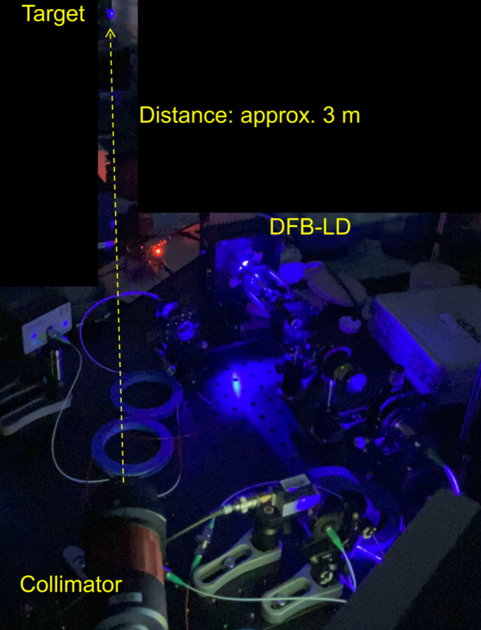
③ FMCW LiDAR動作の世界初実証
可視DFB-LDのみを用いた自由空間FMCW LiDAR測定(約3 m)に成功
事前のチャープ補正(プリディストーション)なしで動作を確認
明らかになった課題と今後の展望
一方で、実験では
レーザ周波数雑音
チャープ非線形性
が距離分解能劣化の主因となることも明らかになりました。
理論的には、
周波数雑音をkHz級まで低減
チャープ非線形性を0.01%以下に補正
することで、数十メートル距離でcm級分解能の水中FMCW LiDARが実現可能であることを示しています。
今後は、
高精度チャープ補正技術
低雑音駆動回路
マイクロ共振器を用いた注入同期
高出力GaNレーザとの組み合わせ
などを通じて、実用的な水中コヒーレントLiDARシステムの実現を目指します。
論文情報
タイトル: FMCW LiDAR with a GaN-based distributed feedback laser diode at 466 nm
著者: Wataru Kokuyama, Hidemi Tsuchida, Yoshiaki Nakajima
掲載誌: Optics Express, Vol.34, No.2 (2026)
https://opg.optica.org/oe/fulltext.cfm?uri=oe-34-2-2799